

100 صفحه پایان نامه تایپ شده برای مهندسی مکانیک به علاوه تمامی کدهای متلب (بیش از 30 فایل کد متلب)
عنوان: طراحی ربات جهت جابجایی شیشه
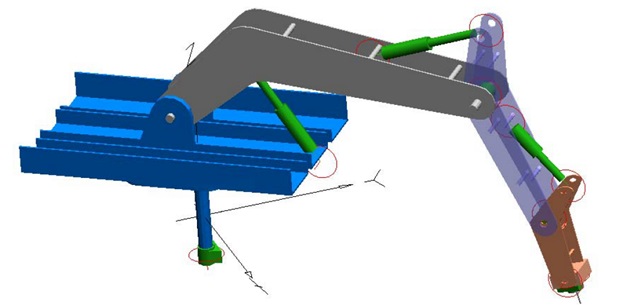
چکیده: در صنايع امروزي بکارگیری از ربات و استفاده از اتوماسیون امري اجتناب ناپذير است. با توجه به این نیاز روزافزون، طراحي و تحليل ربات¬ها و چگونگي انجام این امر، بسيار حائز اهميت مي باشد. در این راستا، در این پایاننامه نيز یک ربات با شش درجه آزادی جهت جابجایی و حمل شیشه طراحی و تحلیل شده است.
مفاصل این ربات انتخابی از نوع لولایی هستند که معادلات سینماتیکی آن، به نسبت از پیچیدگی کمتری برخوردار خواهند بود. همچنین به علت اینکه این ربات دارای شش درجه آزادی میباشد، دارای فضای کاری وسیع و متناسب با فعالیتاش میباشد.
این ربات هم به روش سینماتیک مستقیم و هم به روش سینماتیک معکوس مورد تحلیل قرار گرفته است تا صحت¬سنجی برای محاسبات مربوط به سینماتیک هم شده باشد. با این مقدمه در فصل اول این پایاننامه مقدمهای بر ربات، تشریح اجزاء و دستهبندی انواع آن ارائه میشود. سپس در فصل دوم ربات پیشنهادی معرفی میشود. پس از معرفی پیکربندی ربات پیشنهادی در فصل سوم سینماتیک مستقیم و معکوس ربات مورد بحث و تحلیل قرار میگیرد. در فصل چهارم این پژوهش فضای کاری آن بررسی میشود و در نهایت در فصل پنجم نتیجه گیری از کار انجام شده ارائه میگردد..